In this concept we basically focused on the end-effectors of an robot designed for a specific task , so first we looked at the different manipulators that a robot can and we only looked at the very common ones which were plows, scoops and friction grabbers
Plows: The first category consists of manipulators that apply a single force to the side of an object. They move objects without actually picking them up. One of the most common forms of this manipulator is a simple plow.
Plows: The first category consists of manipulators that apply a single force to the side of an object. They move objects without actually picking them up. One of the most common forms of this manipulator is a simple plow.

Scoops: The second category comprises manipulators that apply force underneath an object such that the object can be elevated and carried. The most common form of this manipulator type is a scoop.

Friction grabbers:
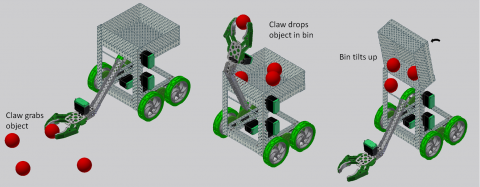
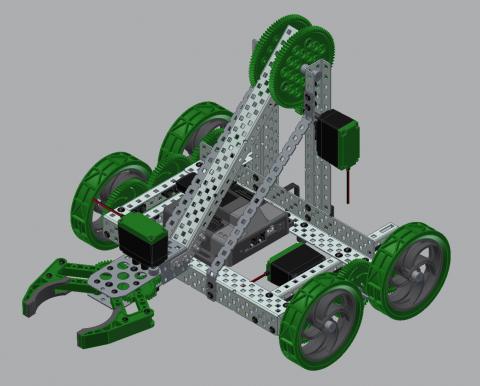
The third category comprises manipulators that apply a normal force between the object and a traction pad, and then rely on the frictional force between the object and this traction pad to manipulate the object. This manipulator category can be described as friction grabbers. The most common form of this manipulator is a claw which pinches an object – the claw fingers pressing against the object provides the normal force, and the friction between the fingers and the object allows for the object to be manipulated.
After we finished investigating manipulators we looked at manipulators and the common ones that we looked was Magazines . Hoppers and conveyor belts .
Magazines:
There are a few common types of accumulators. The first type is a magazine in which objects are loaded one at a time into some sort of storage area and held in a fixed orientation, in line (i.e. the first object in is the last object out). In this type of accumulator the objects are typically not actively manipulated once they are inside the storage area.
Magazines:
There are a few common types of accumulators. The first type is a magazine in which objects are loaded one at a time into some sort of storage area and held in a fixed orientation, in line (i.e. the first object in is the last object out). In this type of accumulator the objects are typically not actively manipulated once they are inside the storage area.

|
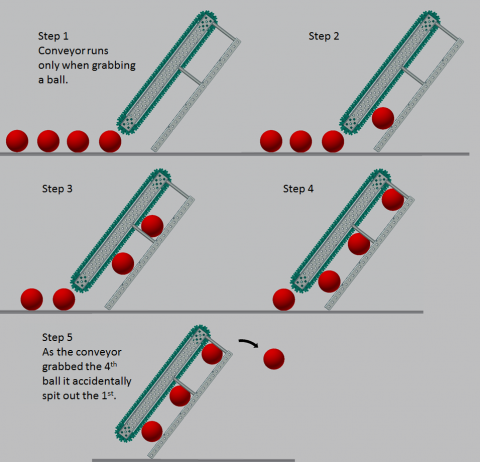
Conveyor Belts: Another type of accumulator is a conveyor belt, which is actually a form of magazine. A conveyor belt type magazine uses some sort of belt to manipulate the objects even after they are inside. Conveyor belts are examples of frictional grabbers (they’re like roller claws that hold more than one object) since they rely on the friction between the belt and object to accumulate. |
|
Hoppers:
A third type of accumulator is a simple hopper, or bin. A hopper is a large storage area in which objects are placed – it differs from a magazine in that the objects are not held in any specific orientation, they’re just thrown into a bin! As such designers of hopper type accumulators must be very careful to ensure the objects won’t jam if they end up in the wrong orientation; some shapes of objects are more appropriate for hoppers than others.
A third type of accumulator is a simple hopper, or bin. A hopper is a large storage area in which objects are placed – it differs from a magazine in that the objects are not held in any specific orientation, they’re just thrown into a bin! As such designers of hopper type accumulators must be very careful to ensure the objects won’t jam if they end up in the wrong orientation; some shapes of objects are more appropriate for hoppers than others.